Input Exploration Kit
At this phase, we want to promote the device for more use cases with our open-source input device in extended reality (XR), hence the name Input Exploration Kit (IEK). With that in mind, the device need to be polished, the size for example is significantly reduced with better finish than the prototype.
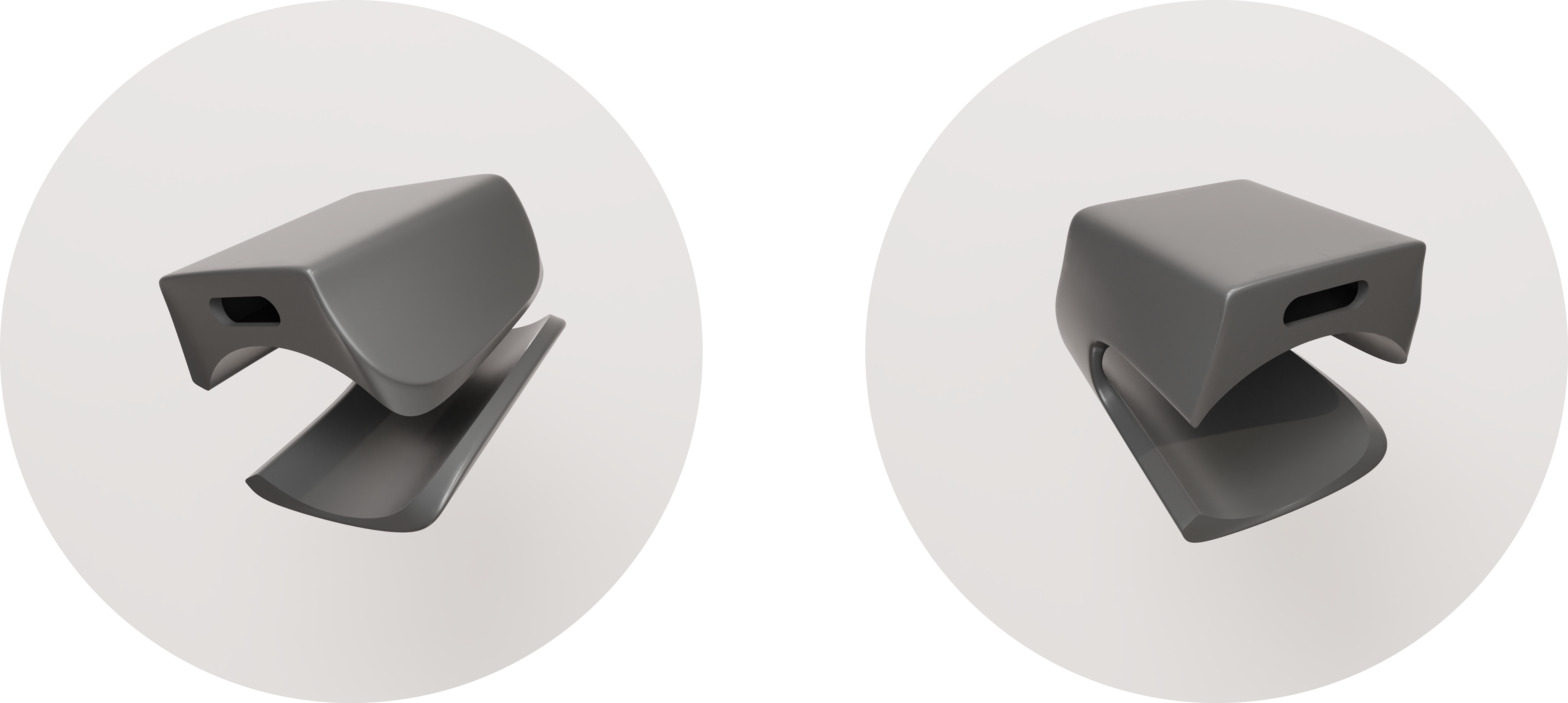
One of the first design in this phase
Disclaimer: in the video I mentioned about the use of force sensitive linear potentiometer but due to the high cost and challenging implementation, the IEK is still developed with force sensitive resistors array as previous versions.
The hand interfaces
The concept of hand interfaces is first introduced at this phase to take full advantages of the finger gestures, it comprises a set of hand interfaces for swiping, sliding or the combinations of those 2. The goal of the hand interface is to provide a quick and easy way to control hand tools and appearance right on hand.
Behind the scene, the transformation data from a hand tracking system (i.e Oculus Hand Tracking) is used for positioning the UI elements, and the role of the the thumb mounted controller is to sense the user's finger gestures and use it for manipulate the UI. Here are some hand interface prototypes I designed:
Horizontal UI: on this interface, the selection is navigated by swiping the IEK on another finger in left/right directions.
Vertical UI: the selection is navigated by swiping the index finger up/down on the touch slider's surface.
The combination of vertical and horizontal swiping can be used for a levelled UI, in that case horizontal swipe can be used for navigating between the parent sections and vertical swipe for navigating between the child sections. For example, in a drawing application in VR, the parents section may includes the toolsets such as Pointer, Brushes, Shapes, Loupe,... And in this example, the parent section of Brushes may include tools such as Pencil, Marker, Spray paint,... in which by navigating the selection to one of the said tools, the hand of user will be assigned with the feature of that tool and can be used with force adjustment.
Fine tuning: In some applications, where a characteristic of the hand tool is adjustable within a range, the real time positioning mechanism (up to 800 units) of the FSLP can be used for fine tuning that characteristic right on the IEK.
Modularity
The problem of fitness has addressed by making the IEK modular, including an outer shell and a component insert with the outer shell can be selected from 3 size small, medium and large depending on the user thumb's size.
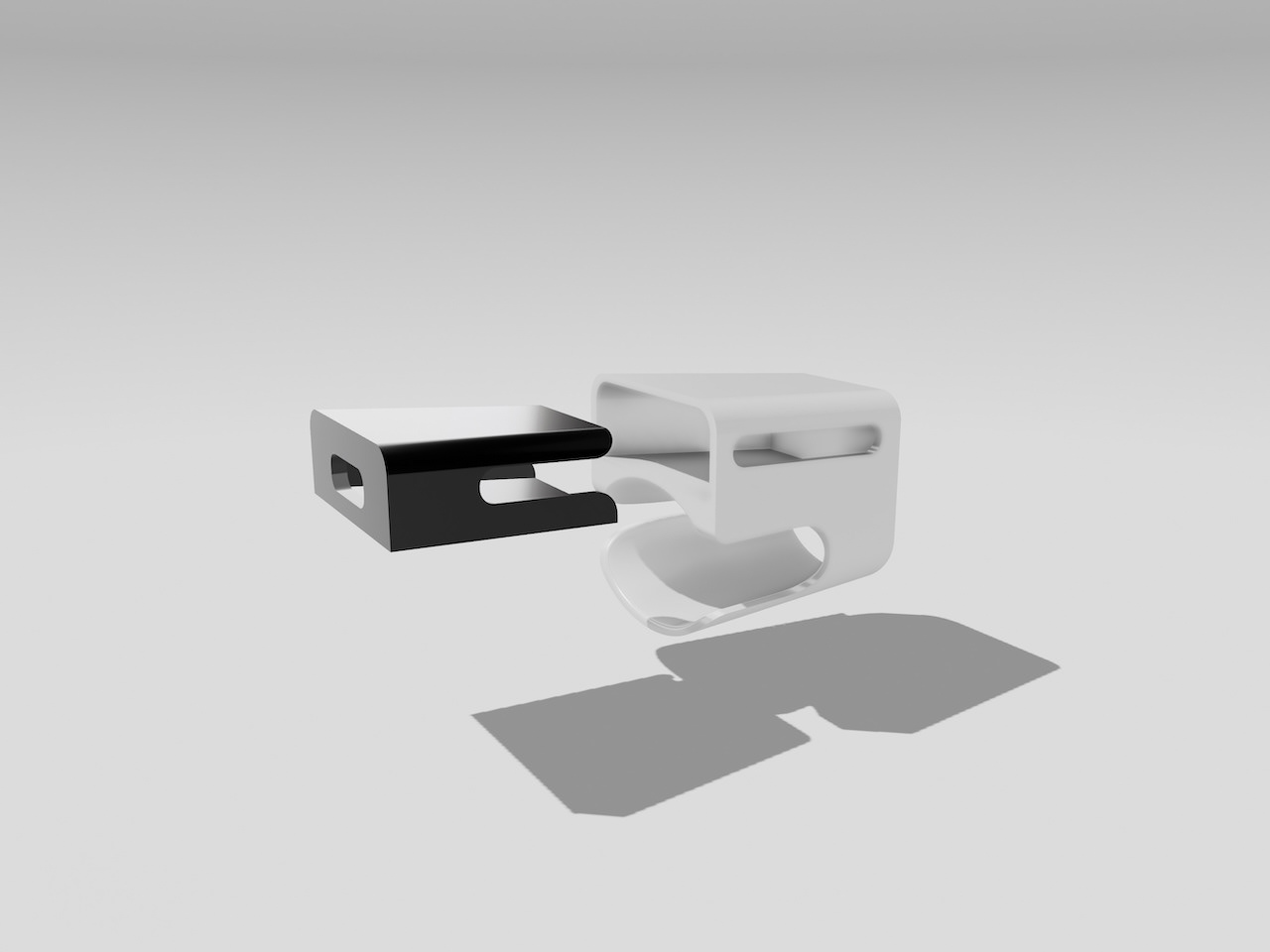
The component insert can be pulled out for shell changing.

3 different shell sizes with single insert.

3D printed of the Input Exploration Kit (size S) on my thumb.
What's going on?
At the moment, we are working on implementing the IEK onto more systems, one of which is OpenAR, an open-source project working on accessible Augmented Reality hardware platform. At the same time, the IEK is still being improved in term of algorithm and adding more features.